







Garázs
Hogyan működik az elektronikai rendszer az autókban?
Kommunikáció a lemezek alatt: főszerepben a CAN busz és utódai.
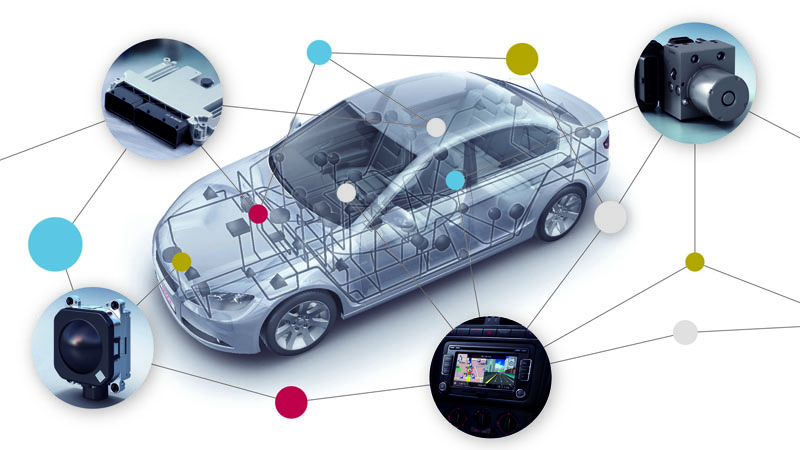
Napjainkban egyre több és több elektronikai rendszer alkot szövevényes hálót az autókban, kifejezetten komoly feladat elé állítva a mérnököket. Ahhoz, hogy minden tökéletesen működjön, kezdve a motortól egészen az adaptív fényszóróig és a klímáig, fontos, hogy az adott komponensek információt cserélni képesek legyenek egymással. Ezt a feladatot valósítja meg az autók elhagyhatatlan kommunikációs hálózata.

Ehhez nélkülözhetetlen egy olyan kommunikációs rendszer felállítása, ahol az adott komponensek képesek egy előre meghatározott protokoll szerint kommunikálni egymással, prioritást adva bizonyos funkcióknak és egységeknek.
A hagyományos rendszerekben az adatcsere dedikált adatvonalakon keresztül történik, egyszerűen szólva minden össze van kötve azzal az egységgel, amelyikkel kommunikálni kell, legyen szó analóg feszültségjelről, vagy digitalizált információról. Azonban ezt a vezérlési funkciók bonyolultabbá válásával, a sokasodó rendszereknek köszönhetően egyre nehezebb és drágább volt megvalósítani. A bonyolult vezérlőrendszerekben az összeköttetések száma tovább már nem volt növelhető, a vezetékek már így is túlburjánzásnak indultak a lemezek alatt.
A hatékony kommunikáció csak a rendszer elemeinek egy soros buszrendszert használó hálózatával lehetséges. Ezért fejlesztette ki a Bosch a “Controller Area Network” nevű rendszert, amit aztán szabványosítottak is (ISO 11898). Ma ez a fajta megoldás jelenti a járművek kommunikációs hálózatának alapját, a legtöbb gyártó ezt alkalmazza modelljeiben. Ennek eredménye, hogy a rengeteg vezeték helyett immáron egyetlen érpár fut mindenhova, megbízhatóan továbbítva az információt a szükséges helyre. A modularitás persze itt is jellemző, és a rendszer előnyének számít, azaz a buszra kis túlzással tetszőleges számú elem csatlakoztatható. A CAN busz rendszer alapvetően ugyanúgy működik a legegyszerűbb Suzukiban, ahogy az extrákkal telezsúfolt Volkswagen Passatban, sőt, még a nyerges vontatókban is ugyanezen elv szerint valósítják meg a gyártók a kommunikációt.

A CAN használatakor az állomások (vezérlők, érzékelők és beavatkozók) soros buszon keresztül vannak összekapcsolva. A busz egy szimmetrikus vagy aszimmetrikus kétvezetékes áramkör, ami lehet árnyékolt vagy árnyékolatlan is. A fizikai átvitel elektromos paramétereit szintén az ISO 11898 szabvány specifikálja. A hálózat detektálja és kijavítja az elektromágneses zajokból eredő átviteli hibákat. Az egyszerű konfigurálás és a központi hibaellenőrzés szintén a hálózat előnyös tulajdonságai. A CAN rendszerek járművekben való használatának célja annak lehetővé tétele, hogy az állomások központi vezérlő számítógép használata nélkül tudjanak kommunikálni.
A CAN működése nem túl bonyolult: adott egy generált kód, amely több részből áll, s nem csupán a szükséges információt (pl.: fordulatszám értéke) tartalmazza, hanem a saját azonosítóját és még jó néhány apróbb adatot. Az adatátvitelkor nincs konkrétan megcímzett állomás, ehelyett az üzenet tartalmát egy, a hálózatban egyedi azonosító jellemzi – egyszerűen mondva minden, a kommunikációban részt vevő egység a saját „nevével” fémjelezve adja fel az üzenetet. Az azonosító nemcsak a tartalmat definiálja, hanem az üzenet prioritását is. Erre a busz allokáció során van szükség, amikor több állomás verseng a hozzáférés jogáért.
Ha egy adott állomás CPU-ja egy vagy több állomásnak üzenetet akar küldeni, az átviendő adatokat és azonosítókat a hozzárendelt CAN chipnek továbbítja, mindösszesen ennyi a CPU összes feladata. Az üzenet összeállítása és elküldése már a CAN chip feladata. Amint a CAN chip megszerzi a buszhozzáférés jogát, az összes többi állomás veszi az üzenetét. A CAN hálózat minden állomása, mely helyesen vette az üzenetet, végrehajt egy elfogadási tesztet, hogy eldöntse, a vett adat neki szól-e. Ha igen, feldolgozza, különben eldobja. Magyarán szólva az üzenetet mindenki megkapja, azonban az azonosítót használva csak az a kommunikációs fél használja fel, amelynek szüksége van rá.
A tartalom orientált címzési sémának köszönhetően a rendszer és a konfiguráció nagyfokú rugalmassága érhető el. Nagyon egyszerűen lehet új állomást felvenni a hálózatba a többi állomás szoftverének vagy hardverének módosítása nélkül, ha az új állomások csak vevők. Viszont van egy hátránya is ennek a megoldásnak, mégpedig a sebessége, hiszen az alacsony 1Mb/s-os sávszélessége miatt a CAN busz nem képes audió és videó adatok továbbítására.
A CAN persze kapott időközben konkurenseket is, az európai gyártók például költséghatékonysági szempontok alapján fejlesztették ki az ezredfordulón a LIN (Local Interconnect Network) kommunikációs rendszert, azonban széleskörűen nem terjedt el. A relatíve lassú, maximum 19,2 kbit sebességű busz mindösszesen egy mester és legfeljebb tizenhat szolga egységből állhat. Épp ezért jellemzően ajtómoduloknál, elektromos üléseknél, klímavezérlőknél használják, mindössze azért, mert olcsóbb, mint a CAN.
A MOST ugyancsak fontos, ki nem hagyható elem. A Media Oriented Systems Transport rövidítéséből előállt mozaikszó lényegében egy audio és video streamelésére alkalmas hálózatot takar, amely általában optikai szálon vezetik, nem véletlenül. Ez a buszrendszer már 150 Mbit/s sebességre képes, s a könnyű alkalmazhatóság érdekében plug and play rendszerű. Az ezredfordulón jelent meg első íben BMW 7-es BMW sorozatában, hogy olyan multimédiás élményt nyújtson, amire az addigi kommunikációs rendszerek nem voltak képesek – azóta is lelkesen alkalmazza az autóipar, főként a prémium kategóriás, fejlett multimédiás rendszerrel rendelkező modellek esetében. Konkrétan nem konkurense a bemutatott CAN hálózatnak, sokkal inkább annak hatékony kiegészítője, ahogy a később felbukkan FlexRay is.
Ez utóbbi az úgynevezett x-by-wire „vezeték általi” (elektromos vezérlés, hagyományos mechanikus helyett) technológiák alkalmazására lett kifejlesztve, például kormányzás/fékezés megvalósítására mechanikus/hidraulikus eszközök nélkül, melyeket a jövőben FlexRay kontrollerek váltanak majd fel. Itt egy nagy sebességű, szinkron és aszinkron átviteli módot is támogató rendszerről beszélünk, mely 10 Mb/s sávszélességgel rendelkezik, ráadásul kétcsatornás módot is támogat. Ezt a szabványt autógyártók, elektronikai beszállítók és félvezetőgyártók hozták létre.

A FlaxRay protokollt 2000-ben kezdték fejleszteni, s immáron 2×10 Mb/s sávszélesség biztosít kellő képességeket a drive-by-wire megoldások megalapozásához – így akár hússzor nagyobb sávszélesség is elérhető, mint a CAN rendszer esetében. Tervezéskor a fő hangsúly a rugalmasságra összpontosult. Szabadon választhatjuk meg, hogy redundánsan vagy nem redundánsan továbbítsuk az üzeneteket. A rendszert optimalizálhatjuk használhatóságra, vagy teljesítményre, mindezt úgy, hogy kiterjesztjük a rendszert a csomópont programjának beállítása nélkül. Továbbá a rendszer több különféle különböző busz topológiákat is támogat.
A FlexRay arra lett tervezve, hogy kiszolgálja az új technológiákat és alkalmazásokat, de a nagy sávszélességnek és hálózati rugalmasságnak köszönhetően teljesíti több jelenlegi autókban használt alkalmazás szükségleteit is. Azokban az alkalmazásokban, ahol nagyobb sávszélességre van szükség, mint amit a CAN biztosítani tud, vagy ahol kettőnél több CAN buszt használnak párhuzamosan, már a FlexRay jelenti a nyerő választást.
Mindez pedig még csupán a jelen, az elkövetkező években további előrelépések várhatóak a kommunikációs technológiákat illetően is. Noha a kellően nagy sávszélesség és a biztonságos, redundáns protokoll már rendelkezésre áll, példának okáért az önvezető autók bonyolultsági foka még nagyobb teljesítményű rendszerek kifejlesztését igényelheti majd.
Forrás: Autó Pult

[fbcomments url="https://www.technokrata.hu/garazs/2015/12/07/hogyan-mukodik-az-elektronikai-rendszer-az-autokban/" width="800" count="off" num="3" countmsg=""]